
当前位置:首页 > 产品中心












































矿用的机器

矿山机械设备百度百科
选矿是在所采集的矿物原料中,根据各种矿物物理性质、物理化学性质和化学性质的差异,选出 有用矿物 的过程。 实施这种过程的机械称为选矿机械,选矿机械按选矿流程分为破碎、粉磨、筛分、分选 (选别)和脱水机械。2023年6月20日 — 煤矿机器人是能依靠随身动力和自主控制能力来实现某种特定采矿功能的机器人,可以通过受人指挥、预先编程、人工智能规划的方式,协助或替代人的采矿作业 刘峰:煤矿机器人的五大应用场景和十大关键技术矿山采矿
.jpg)
九种搞矿必备的机械装备 知乎
2019年12月4日 — 采矿机械是直接开采有用矿物和采准工作所用的机械设备,包括:开采金属矿石和非金属矿石的采掘机械;开采煤炭用的采煤机械;开采石油用的石油钻采机械。2024年4月23日 — 华为将持续投入创新,构建以矿鸿、工业承载网、云基础设施、数字平台和智能应用为核心的工业互联网架构智能矿山,携手生态伙伴、科研院所,使能矿山客户,让矿山智能化建设行稳而致远。智能矿山矿山智能化华为企业业务
.jpg)
煤矿机器人关键技术与应用场景分析智能矿山网
2024年2月4日 — 随着国家政策的大力支持以及煤矿机器人技术的不断发展,其应用场景将会十分广泛,包括:(1) 对狭小矿井空间进行探测和勘探,从而获取如煤层厚度、品质和 2024年4月24日 — 发布《矿山机器人重点研发目录》,鼓励有条件的地区构建完整产业链,填补各类矿山机器人研发应用空白。 提升矿山机器人性能,加快完善矿山巡检机器人精准 关于印发《关于深入推进矿山智能化建设促进矿山安全发展的

华为矿鸿:开辟煤矿智能化建设新纪元 华为
2022年9月20日 — 华为“一网一云一平台”的智能煤矿总体架构,是基于统一的基础网络、统一的云计算服务与统一的数字管理平台,实现煤矿全业务融合与管理,是IT与CT的融合;与此同时,华为矿鸿的推出,也实现了 采矿机械是直接开采 有用矿物 和开采准备工作所用的机械设备,主要有开采金属矿石和 非金属矿石 的采掘机械;开采煤炭用的采煤机械;开采石油用的石油钻采机械等。矿用机械设备百度百科
.jpg)
矿用智能巡检机器人:深矿之眼的革命性探索 百家号
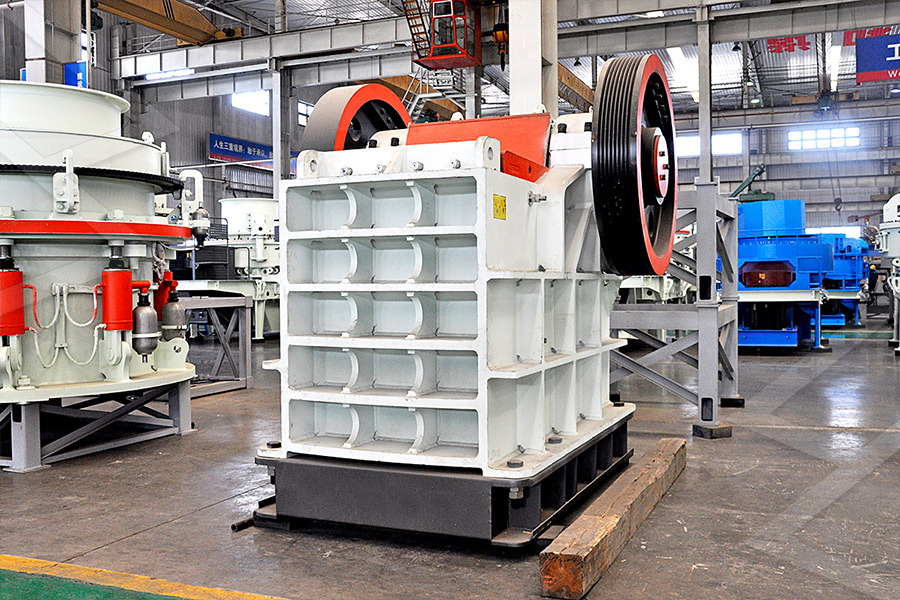
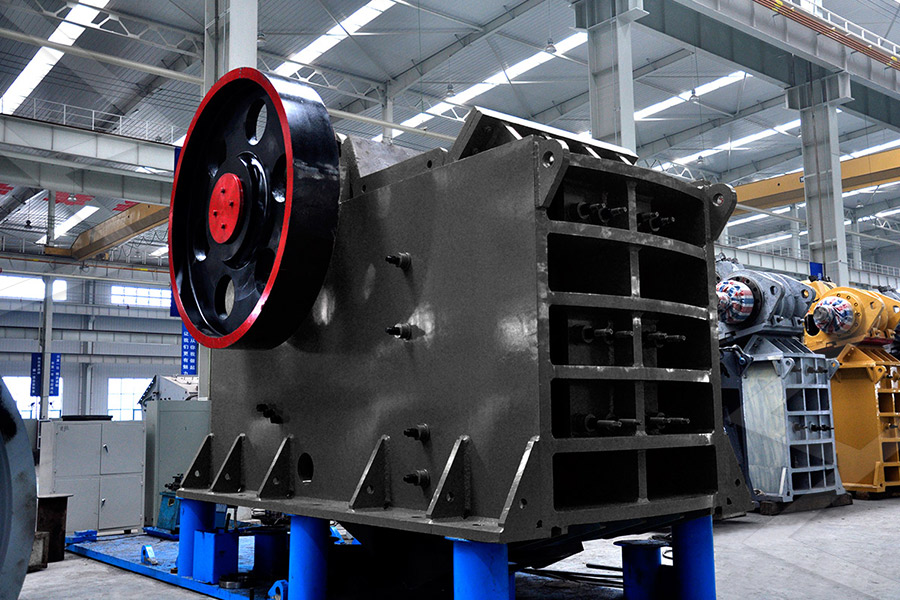
2024年3月12日 — 矿用智能巡检机器人,顾名思义,是一种专门用于矿山环境,集数据采集、图像处理、自主导航、远程操控等功能于一体的智能设备。它能够在复杂多变的矿山环境中自主工作,通过搭载的高清摄像头、红外热像仪、气体检测传感器等先进设备,实现对矿井内部环境的全面监控。矿用破碎机具有破碎比大、产品粒度均匀、结构简单、工作可靠、维修简便、运营费用经济等特点。广泛运用于矿山、冶炼、建材、公路、铁路、水利和化学工业等众多部门,破碎抗压强度不超过320兆帕的各种物料。矿用破碎机百度百科
.jpg)
特种智能装备机器人矿下智能作业矿井侦查救援煤矿灾害
薄煤层钻装机器人获得煤矿安全认证并顺利交付 近日,从山东君德智能装备有限公司传来喜讯,由公司自主研发生产的矿用钻装机器人一次性通过煤矿安全认证。 矿用钻装机器人主要用于井下巷道钻孔、装载、运输作业。薄煤层钻装机器人获得煤矿安全认证并顺利交付 近日,从山东君德智能装备有限公司传来喜讯,由公司自主研发生产的矿用钻装机器人一次性通过煤矿安全认证。 矿用钻装机器人主要用于井下巷道钻孔、装载、运输作业。特种智能装备机器人矿下智能作业矿井侦查救援煤矿灾害
.jpg)
基于YOLOV4的矿用巡检机器人无标定视觉伺服控制系统
摘要: 针对传统的矿用巡检机器人视觉伺服多是在标定条件下实现,标定参数精度较差,无标定视觉伺服控制系统因其具有更好的适应性,灵活性,越来越得到广泛的认可基于YOLOV4算法,采用CSPDarknet53网络结构,对矿用巡检机器人无标定视觉伺服控制系统进行设计实验,并与YOLOV3,SSD,AlexNet这3种模型进行分析 2024年1月28日 — 矿用巡检机器人的 应用将极大地提升矿业的安全性和生产效率。首先,机器人能够代替人工进行危险区域的巡检工作,有效降低矿难事故的发生概率。其次,通过机器人的智能化管理,矿山企业能够实时掌握矿山的安全状况,实现科学调度和精准 矿用巡检机器人:引领未来矿业安全与效率的革新者

拉电缆的机器叫什么矿用电缆网
2023年11月13日 — 拉光缆的的对吧。我就在用。电缆施工拉缆有啥好使的工具没有?人力拉的太累了使用时先把紧线器上的钢丝绳或镀锌铁线松开,并固定在横担上,用夹线钳夹住导线,然后扳动专用板手。电缆输送机和电缆牵引机的区别电缆输送机是一种敷设电2024年1月9日 — 矿用巡检机器人具备多种先进的功能。首先,它们能够自主导航,根据预先设定的路径进行巡检,确保每个区域都得到覆盖。其次,机器人配备有多种传感器,能够实时监测矿井内的环境参数,如温度、湿度、气体浓度等,为安全生产提供有力保障。矿用巡检机器人:重塑矿业安全与效率的革命性力量

“机器人家族”再添新成员——矿用卡车轮胎螺栓自动拆装机器
2023年8月23日 — 同时,矿用卡车轮胎螺栓自动拆装机器人具有扭矩控制、角度控制等功能,不受光线限制,在夜间等其他复杂工况下也能正常使用,并且能有效提高螺栓拆装的准确性,降低拆装过程中螺栓和电动轮机孔的损伤机率。 这台机器人是设2023年6月20日 — 煤矿机器人或机器人化研发应用,能够使以往传统的装备达到更高的智能化水平,获得更广阔的应用场景,这就是“机器人+”的含义。 2019年,国家矿山安全监察局发布了38种煤矿机器人,针对20种不同的应用场景可分为五大类:掘进类、采煤类、运输类、安控类和救援类。刘峰:煤矿机器人的五大应用场景和十大关键技术矿山采矿

中信重工开诚智能裴文良:煤矿机器人关键技术与应用场景分析
2024年4月9日 — 在煤矿机器人方面,开诚智能已研发出智能井筒监测机器人、井下运输安全预警机器人、防爆轮式巡检机器人、智能选矸机器人、防爆轨道巡检机器人、输送带纵撕检测机器人、防爆固定值守机器人、矿用消防机器人、煤化工巡检机器人等10余类(图2),可执行井下巡检、值守、洗选、侦测、预警 矿用搜救机器人是一种在矿井发生灾变事故后替代救护队员进入灾区,通过携带的多种传感器和救援设备,进行环境和生命探测以及对矿工实施救助的多功能矿用智能救援装备。本书针对矿用搜救机器人的工作环境和任务要求,对其研发中所涉及的主要技术问题及解决方法进行了 矿用搜救机器人 科学文库
.jpg)
20242029年中国矿用井下智能巡检机器人行业市场深度研究
2024年3月30日 — 报告对我国矿用井下智能巡检机器人行业的市场前景、重点企业以及国家相关产业政策进行了全面分析。报告重点分析了我国矿用井下智能巡检机器人行业的经济发展与现状,以及我国矿用井下智能巡检机器人行业进展与投资机会,并对矿用井下智能巡检机器人行业投资前景作了分析研判,是矿用 2024年7月26日 — 本发明涉及机器人路径规划,具体涉及一种基于人工智能的矿用机器 人路径规划方法、装置及存储介质。背景技术: 1、井下移动机器人在实现智能化前,首先要解决自主移动问题。移动机器人若要实现自主行走,需要完成定位、建图、路径规划 一种基于人工智能的矿用机器人路径规划方法与流程
.jpg)
基于PID控制算法的矿用巡检机器人设计 百度学术
摘要: 针对传统人工巡检方式的人力与时间成本较大,井下工作人员安全隐患高等问题,设计了一种基于PID平衡自调节算法的矿用巡检机器人测试结果表明,经自适应不完全微分PID算法处理,基于PWM控制电机升降速率来调整机器人平衡的方式稳定可靠,满足井下实际需求2023年3月5日 — 煤矿机器人行业分析报告:煤矿机器人是能依靠随身动力和自主控制能力来实现某种特定采矿功能的一种机器,是智能矿山建设的重要组成部分,随着智能技术发展,煤矿机器人有望替代人工完成矿山高危工作。本文带你看中国煤矿机器人行业发展现状。2023年中国煤矿机器人行业发展现状及市场规模分析 煤矿机器
.jpg)
矿用防爆机器人大族机器人 Han's Robot
2023年11月2日 — 矿用防爆机器人 是一种专门设计用于在矿山等爆炸危险环境中进行作业的机器人。 它具有以下特点和功能: 一、隔爆设计 矿用防爆机器人采用特殊的设计和材料,能够有效隔离和防止机器人内部的电子元件和电路与外界的可燃气体或粉尘接触,从而防止火花或电弧引发爆炸。2019年9月7日 — 煤矿救援机器人的研制虽已取得很大进展,但仍然存在诸多问题,主要如下: (1)续航能力有限。由于煤矿救援机器人质量较大,需要消耗很大动力,而现有机器人的动力电源存在充电速度慢、体积大、质量 煤矿救援机器人研究现状及发展趋势
.jpg)
矿山开矿的机械设备有哪些 知乎
2021年3月13日 — 回转式破碎机:常用的二次破碎设备,主要用于抗压强度在350兆帕以下的中、低硬度物料,成品石粉少,对生产物料有一定的成形作用。 锥式破碎机:是目前比较智能的一种二次破碎设备,主要用于高度物料的处理,分层破碎,恒腔设计,产量高,失效率低。2018年5月2日 — 在机器自动化之后,矿山的劳工成本已经降低了三分之一。在400辆重型卡车车队中的76个无人驾驶车辆的帮助下,皮尔巴拉(Pilbara)矿场的运营成本预计比其他矿山低了15%左右。全球首座智能矿山:世界矿业巨头22亿打造的机器人军团
.jpg)
一种附带机械臂的矿用防爆巡检机器人 百度学术
2022年5月30日 — 摘要: 本发明涉及一种附带机械臂的矿用防爆巡检机器人,包括巡检机器人车架,巡检机器人车架底部设置有车轮,巡检机器人车架上设置有升降轨道,巡检机器人车架顶部安装有六自由度机械臂;巡检机器人车架的前后方分别设置有前方激光雷达,后方激光雷达,与前方激光雷达同侧设置有云台和热成像仪 2020年9月20日 — 介绍了矿用智能巡检机器人研究现状,针对目前矿用智能巡检机器人的特点,从移动平台、定位与导航、图像识别、自主充电、后台管理及诊断等方面详细分析了矿用智能巡检机器人的关键技术:移动平台是矿用智能巡检机器人的重要组成部分,不同的移动平台工作方式不同,应根据巡检场所的环境 矿用智能巡检机器人关键技术研究

《中国煤炭杂志》官方网站
中国煤炭杂志官网,中国煤炭编辑部主办,010 010。中国煤炭杂志(CHINA COAL)是国家级综合性期刊,探索煤炭工业的可持续发展道路,报道重大的煤炭科技成果、新的学术思想和新学科的发展,介绍世界煤炭工业的现状和发展趋势2024年5月5日 — 矿用水位监测的重要性机器视觉技术的优势机器视觉在矿用水位监测的应用前景监测系统的重要性 监测方式的传统与挑战1传统监测方式精度低传统水位监测方法如浮标法和电阻法,常受水质和环境因素影响,导致精度误差超过5%,难以准确反映实际水 机器视觉在矿用水位监测系统中的应用 (1)pptx原创力文档

矿用智能巡检机器人关键技术研究
2020年8月13日 — 矿用智能巡检机器人的 出现提升了煤矿作业环境的安全性,降低了矿工劳动强度,达到了减员增效的效果,有着巨大的应用前景和商业价值,其关键技术成为煤炭科技研究的热点。从研究现状来看,许多关键技术还有待进一步突破 知乎 有问题,就会有答案
.jpg)
煤矿井下履带式侦察机器人浙江丞士机器人有限公司
煤矿井下履带式侦察机器人是一款用于替代消防救援人员进入易燃易爆、有毒、缺氧等危险矿洞事故现场,远距离智能遥控开展排烟、侦查等消防救援工作,可同时进行数据采集、处理及反馈的智能应急救援防爆机器人。摘要: 我国首台矿用抢险探测机器人近期在河北省唐山市研制成功,这标志着我国煤炭安全装备研发取得突破,成为继美国之后第二个掌握此项技术的国家据介绍,研制开发的矿用抢险探测机器人具有防爆,越障,涉水,自定位,采集识别和传输各种数据的功能,能进入事故现场采集影 我国首台矿用抢险探测机器人研制成功 百度学术
.jpg)
基于机器视觉的矿用带式输送机跑偏故障检测系统智能矿山网
矿用带式输送机将大量煤炭不断从井底运输到地面的过程中,会发生各种各样的故障,其中输送带跑偏是最常见的故障之一。当发生输送带跑偏时,大量煤炭从输送带一侧掉落,直接会影响生产效率,甚至威胁矿工生命安全。 机器视觉算法通过采集图像对感兴趣区域的像素进行研究,目前已应用在 2022年1月1日 — 招商局座:中信重工煤矿机器人 中信重工开诚智能装备有限公司是国内知名的集研发、生产、销售、服务于一体的智能装备制造企业。拥有危险环境特种智能机器人国家地方联合工程研究中心、国家企业技术中心和国内大型高压4MW传动产品实验室。招商局座:国内煤矿机器人公司大盘点 知乎
.jpg)
一种矿用管道检测机器人设计及牵引性能分析
2023年4月22日 — 针对瓦斯抽采管道破损泄漏检测问题,设计了一种具有管道检测和运动控制功能的螺旋式矿用管道检测机器人,介绍了该机器人的结构和检测与控制系统方案。建立了机器人在管道中运行的力学分析模型,并通过动力学仿真研究了影响机器人牵引性能的因素,结果表明:机器人在管道内运行时的牵引 摘要:针对带式输送机的堆煤故障设计了一套基于机器视觉的煤矿带式输送机监控系统,该系 时,工作顺序 产生 ( 5% 不 带 式 输 送 机 的 运 行 无 法 配 2矿用带式输送机系统总体设计 为, 是 接 式传感器的 不 处, 用 接 的 法 于 机器 的矿用带式输送机,基于机器视觉的矿用带式输送机堆煤故障监控系统研究百度文库

矿用装载机 / 矿井装载机 / 矿山装载机 Cat
2 天之前 — 随着我们不断推出新产品(例如 R2900 XE 柴电装载机),将旧型号更新为新的、超清洁欧盟 Stage V 柴油发动机,并完成零废气排放 R1700 XE 蓄电池电动装载机的开发工作,Cat LHD 发生了巨大变化。我们希望您能经常回来看一看我们如何改造这个产品系列,以 2023年4月28日 — 公司研发一种可以实现自动化作业、减少施工人员数量、降低工人劳动强度、适用性强的矿用喷浆机器人集群装备,主要由矿用混凝土辅助喷射车(喷浆机械臂)与湿式混凝土喷射机组、矿用混凝土上料机或矿用混凝土泵、矿用搅拌机组成。产品特点矿用喷浆机器人 陕西煤业化工技术研究院有限责任公司

矿用智能巡检机器人:深矿之眼的革命性探索 百家号
2024年3月12日 — 矿用智能巡检机器人,顾名思义,是一种专门用于矿山环境,集数据采集、图像处理、自主导航、远程操控等功能于一体的智能设备。它能够在复杂多变的矿山环境中自主工作,通过搭载的高清摄像头、红外热像仪、气体检测传感器等先进设备,实现对矿井内部环境的全面监控。矿用破碎机具有破碎比大、产品粒度均匀、结构简单、工作可靠、维修简便、运营费用经济等特点。广泛运用于矿山、冶炼、建材、公路、铁路、水利和化学工业等众多部门,破碎抗压强度不超过320兆帕的各种物料。矿用破碎机百度百科

特种智能装备机器人矿下智能作业矿井侦查救援煤矿灾害
薄煤层钻装机器人获得煤矿安全认证并顺利交付 近日,从山东君德智能装备有限公司传来喜讯,由公司自主研发生产的矿用钻装机器人一次性通过煤矿安全认证。 矿用钻装机器人主要用于井下巷道钻孔、装载、运输作业。薄煤层钻装机器人获得煤矿安全认证并顺利交付 近日,从山东君德智能装备有限公司传来喜讯,由公司自主研发生产的矿用钻装机器人一次性通过煤矿安全认证。 矿用钻装机器人主要用于井下巷道钻孔、装载、运输作业。特种智能装备机器人矿下智能作业矿井侦查救援煤矿灾害
.jpg)
基于YOLOV4的矿用巡检机器人无标定视觉伺服控制系统
摘要: 针对传统的矿用巡检机器人视觉伺服多是在标定条件下实现,标定参数精度较差,无标定视觉伺服控制系统因其具有更好的适应性,灵活性,越来越得到广泛的认可基于YOLOV4算法,采用CSPDarknet53网络结构,对矿用巡检机器人无标定视觉伺服控制系统进行设计实验,并与YOLOV3,SSD,AlexNet这3种模型进行分析 2024年1月28日 — 矿用巡检机器人的 应用将极大地提升矿业的安全性和生产效率。首先,机器人能够代替人工进行危险区域的巡检工作,有效降低矿难事故的发生概率。其次,通过机器人的智能化管理,矿山企业能够实时掌握矿山的安全状况,实现科学调度和精准 矿用巡检机器人:引领未来矿业安全与效率的革新者